Functional ABM API
The code for this project can be found on it’s github repo
Introduction
Most agent based modeling (ABM) frameworks tend to make use of an
object-oriented (OOP) principals, and probably with good reason. The agents
in an ABM are generally stateful and thus natural candidates for
representation by classes encapsulating state and functionality; and
inheritance (or composition) allows common functionality to be reused.
This project was an experiment in creating a “functional” ABM API inspired in part by computation graph building APIs. Generally speaking these allow a developer to construct a computation graph from function definitions with the work of linking everything together done in the background (something like dagster is a good example).
It was also motivated by a couple of things I’ve noticed when writing ABMs using OOP patterns (though these are very subjective!):
- Python has some really great OOP features, but it sometimes feels that the flexibility and dynamic nature of python makes using OOP patterns a bit tedious when writing an ABM; where you often want interfaces and encapsulation to be followed quite strictly. This is obviously less of a concern in other typed/compiled languages, but then you lose the flexibility and speed of work in python.
- I also feel I end up writing a lot of boilerplate code, and ABM APIs tend not to offer much apart from templates classes, or the patterns they do recommend tend to be quite restrictive.
So the aim was to try and create and API that did a lot of work in the background, and offered a clean and flexible API to build a model.
Disclaimer The design I ended up with did not turn out strictly “functional” as it still sometimes relies on updating objects in-place for reasons that will be outlined in this post. Though I feel a proper functional approach is possible with some tweaks.
Theory
Very an broadly an agent based model consists of agents that interact in some manner (possibly inside a simulated environment). As the model progress the state of agents are updated depending on the state of other agents and the environment. It’s usually the job of the model designer to dictate how the agents behave and also how agents interact within the model/environment.
At the core of this is the concept of representing the time evolution of the model as a causal graph.
On the graph agents are represented by nodes, and edges represent causal dependence between agents. Each agent owns its own state, so altogether the agents represent the model/simulation environment, and the graph how the components of the environment interact over time.
Each node (i.e. agent) then has:
- Nodes that precede it causally: The state of these nodes then act as inputs to the update function of the node. These nodes could also be thought of as being the observed state of the model when the node updates
- Downstream nodes that the node can update. This allows the node to alter the environment outside the state it owns.
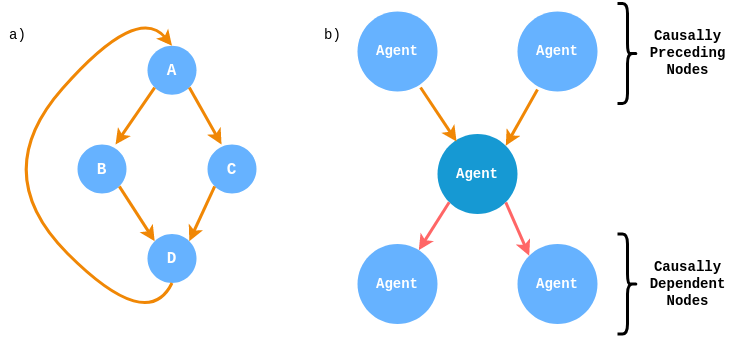
a) Agents are represented as nodes on a causal graph, directed edges represent where an agent is dependent on the state of other agents, and the direction of the arrows indicate the direction of time direction. Unlike a DAG computational graph the graph can be recursive with agent updating at multiple time-steps.
b) Each agent(node) has nodes in its causal past that act as inputs/observations, and downstream nodes that it can alter.
If you are familiar with DAGS (or computational graphs, neural networks etc.)
this will likely seem familiar with the differences being that the causal
graph can be recursive (as agents can update multiple times/repeatedly) and
the agents are stateful.
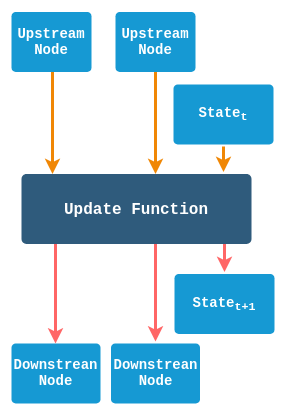
To represent this in a functional framework we break up an agent definition into two components
- The state of the agent
- An update function that is called when the agent is updated
When the agent is updated, its update function is called with the states of the preceding agents and the current state of the agent as arguments. The update function then returns the new state of the node, and any updates to the state of downstream nodes.
Implementation
@agent Decorator
An agents behaviour can be defined by decorating an update function with
the @agent decorator. The function should have the signature
@agent(scheduler=scheduler)
def foo(t, antecedents, state, descendants):
# Update state and descendants
...
return next_event_timeWhen the update function is called the arguments will be
t: The current model timeantecedents: Data structure containing the states of preceding nodesstate: The state of the node that is updatingdescendants: Data structure containing states of descendant nodes that this node can update
and it returns one value, the time this agent will next update.
The decorator argument scheduler is a class that controls when agents are
called and should be provided when the agent is defined (provided as part of
the package).
In this example the decorator would create a new type (class)
called foo wrapping the update function and allowing it to be used as a
component of the model.
As noted above this is where the ‘functional’ approach breaks down as a bit
as the update function is expected to update the state and descendants in
place. This should be possible by instead having the function return
new state and descendants
This was done here as in some cases it’s not possible to store a reference
and assign a value to it. For example for numpy arrays if you try something
x = np.array([1,2,3])
y = x[:1]
y = np.array([10])this will not update the slice of x that y refers to, it will just change
what y refers to. So in practice it’s easier to pass states by reference and
update them in place
Model Initialization
Initializing the model is then done by creating instances of agent types
following the same signature of the update function, for example for the
foo function we decorated above we might do
# Initial states of the nodes
agent_state_1 = [0]
agent_state_2 = [1]
# Initialize instances of agent nodes
foo(0, agent_state_2, agent_state_1, {})
foo(1, agent_state_1, agent_state_2, {})Where the t argument is the time of the agents first event. In the background
this would initialize agent nodes with agent_state_2 be a precedent of
agent_state_1 and vice versa (and both nodes have no downstream dependents).
Example
This is probably better explained with a more in depth example. We can implement a function that initializes and runs Conway’s game of life using this API. In full this looks like:
def gol(steps, initial_state):
scheduler = StepBasedScheduler(steps)
history = []
@agent(scheduler=scheduler)
def cell(t, antecedents, state, descendants):
live_neighbours = np.sum(antecedents) - antecedents[1,1]
if live_neighbours < 2:
new_state = 0
elif live_neighbours == 2:
new_state = state[0,0]
elif live_neighbours == 3:
new_state = 1
elif live_neighbours > 3:
new_state = 0
state[0:1,0:1] = new_state
return t + 1
# Initialize the nodes on a grid
for i in range(1, initial_state.shape[0]-1):
for j in range(1, initial_state.shape[1]-1):
cell(0,
initial_state[i-1: i+2, j-1: j+2],
initial_state[i:i+1, j:j+1],
{})
# Run the model for the requested number of steps and
# at each step store a copy of the array
while not scheduler.finished:
history.append(initial_state.copy())
scheduler.step()
return history This function accepts the initial state of the model (a numpy array) and the number of steps to run the model for. Breaking it down
- This line initializes a scheduler that will run the model for a fixed number of steps
scheduler = StepBasedScheduler(steps)- The agent behaviour (an agent is a cell on the array in this case) is defined using the decorator
@agent(scheduler=scheduler)
def cell(t, antecedents, state, descendants):
live_neighbours = np.sum(antecedents) - antecedents[1,1]
if live_neighbours < 2:
new_state = 0
elif live_neighbours == 2:
new_state = state[0,0]
elif live_neighbours == 3:
new_state = 1
elif live_neighbours > 3:
new_state = 0
state[0:1,0:1] = new_state
return t + 1as expected it looks at the previous state of the cells surrounding it
(its antecedents) and counts the number of live cells then updates its own
state accordingly. It returns t+1 which is the next of the model (all the
cells will use this function so this will all the cells update each
step as desired).
- We then initialize the cells with the relevant antecedents and state. In this case the antecedents are slices of the numpy array representing the neighbourhood surrounding each cell; and the state the relevant cell. It’s then just case of iterating over the array and assigning each cell to an agent. We also set the first step of each agent to fire at 0:
for i in range(1, initial_state.shape[0]-1):
for j in range(1, initial_state.shape[1]-1):
cell(0,
initial_state[i-1: i+2, j-1: j+2],
initial_state[i:i+1, j:j+1],
{})- The model can then be run using the scheduler, and additionally we store a copy of the state at each step ot track the history of the model
while not scheduler.finished:
history.append(initial_state.copy())
scheduler.step()This example used numpy as a data-structure to store the state of the model, but the API is very general, and as long as it can be passed by reference any data structure can be used to track the state and pass the relevant parts of it to the update function.
The scheduling is also very general, in this case the model was designed to
update all the agents at fixed steps, but you could just as well use
datetime as a variable, or have agents act at different intervals.
For more examples see here in the repo.
Conclusion
For a short project I feel this turned out quite neatly. I think one of the nice features that came out as a side effect is being able to make use of different backends to store the state of the model. An approach using classes would require storing state as part of the class structure but with this API we can make more efficient use of data structures to track state. For small models this results in quite neat code.
This does come with some drawbacks though.
- You need to pass everything required as part of the arguments to the update
function (where as part of an OOP pattern you would be able to look up
attributes on the class). For example, you might want to pass in a global
object like a random number generator (the API might benefit from having an
additional
contextargument to make this easier) - Allowing nodes to alter other nodes can cause some conflicts. This seems like a necessary feature to have to allow for a broader range of models (agents should be able to effect their environments right?) but in a model where agents update on the same step, this can cause issues where an agents state is updated by itself and another node. Though this can be avoided with the appropriate design choices.
A python package to be able to use this API can be found on it’s github repo along with usage examples. Please try it out, it’d be interesting to see how this API holds up across more model implementations.